
Research
The central topic of my research has always been computer simulation, but the application area has shifted a bit over time, from neural networks via digital systems and VLSI to robots. For me, setting up a dynamic system or a set of state transitions, writing a program for it, and then watching the system evolve is simply magic (and fun). Of course, simulation also allows one to study systems where analytical approaches are bound to fail due to complexity.My current research interest is software for autonomous robots, in particular grasping and manipulation. I have been working with the Shadow hand since we first bought one in 2009, and we participated in EU FP7 projects HANDLE and Echord HYFLAM with the focus on grasp planning for the Shadow Dextrous hands. The hand is designed to be a similar to the human hand as possible, with the shape and size matched to a typical male hand, and 24 joints overall. The distal joint of the fingers is underactuated, resulting in 20-DOF controllable, and a corresponding enourmous search-space for grasp-planning.
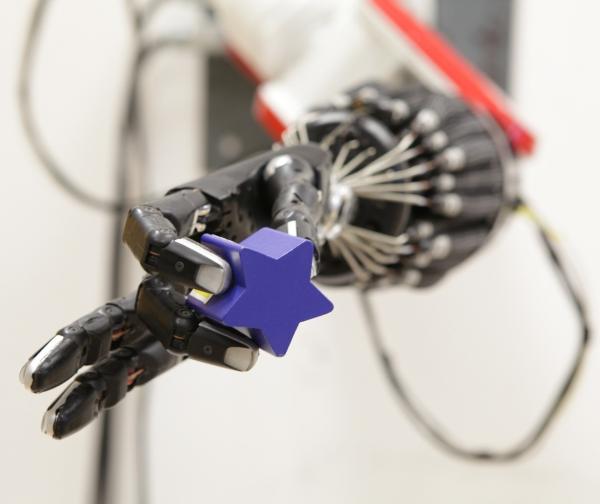
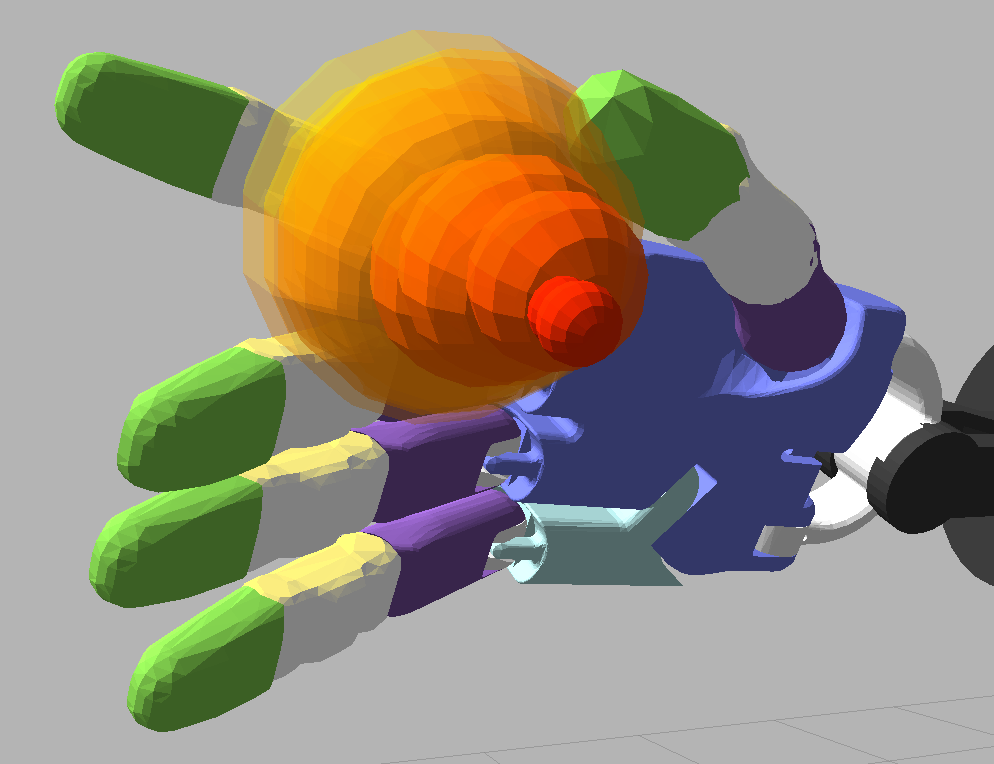
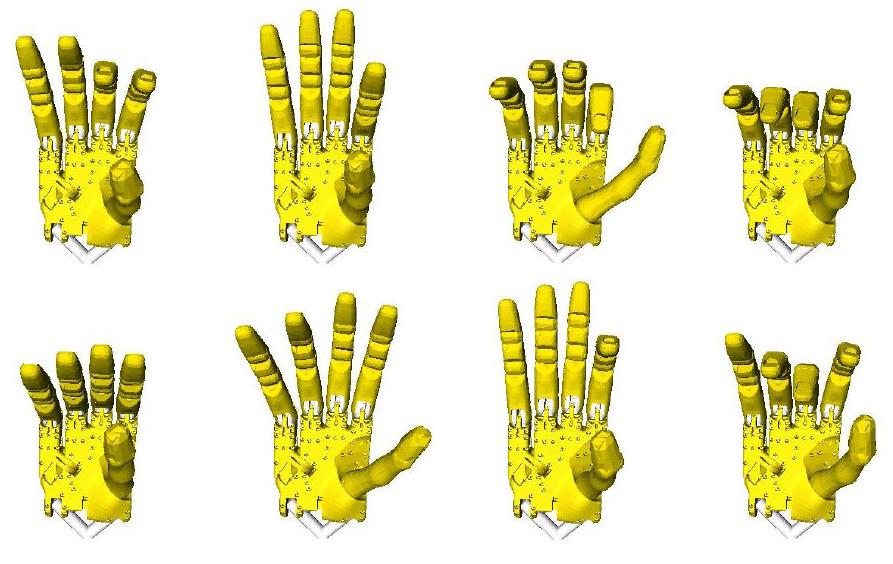
Starting from the traditional tele-operating approach, we worked together with IST Lissabon on extraction and fine-tuning of grasp-synergies for the Shadow hand, with a focus on manipulation motions using precision grasps instead of just stable grasping of objects using power-grasps. We have derived synergy parameters and motion-control software for eight dextrous grasp classes (e.g. Tripod, Palmar pinch), and are now busy on tuning the motions and getting the motion-primitives integrated into ROS and the ROS manipulation-stack and MoveIt! framework.
Previously, I also acted a project manager for FP6 project MING-T and several smaller research projects in the context of the e-learning initiative from the University of Hamburg. In total, we participated in three different projects organized by the ELCH consortium (E-Learning Consortium Hamburg), where the interactive script was probably the most challenging. We designed a software framework to run whole lectures fully interactively using Matlab or Python languages, where images and results are generated on-the-fly according to the parameters set by the professor or the students. This allows the students to not just memorize equations with perhaps a single figure, but to actively explore the system or equations, to get a full understanding. As part of the project, we designed web-based software to also support students doing the exercises, including software to check correctness of answers and to providing hints towards the correct solutions. The reports and software are online in the E-learning section of our website.
The original focus of my research was targeted towards advanced computer architecture and VLSI circuit design, in particular simulation for hardware/software codesign. Please visit the Hades homepage for my Java-based interactive digital systems simulator and our collection of educational interactive applets.