#include <bhandforcekingl.h>
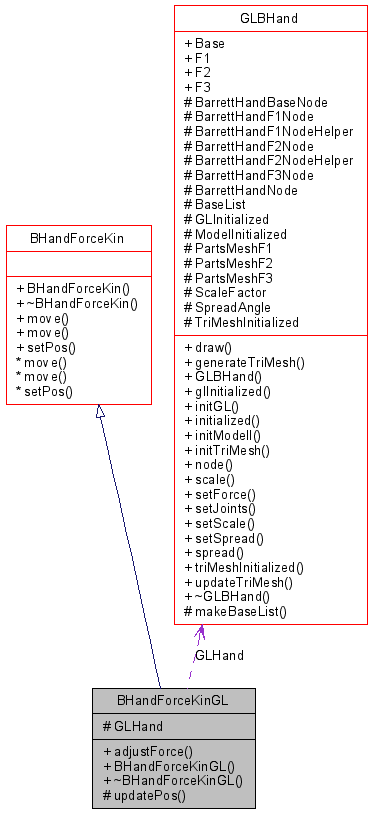
Inheritance diagram for BHandForceKinGL:
Public Member Functions | |
| void | adjustForce (const Motors motors, const int force) throw (BHandException) |
Protected Member Functions | |
| void | updatePos () |
| updates Joint Value of Modell to current of hand. | |
This class combines the options of the BHandForce with the ones given by BHKinematic. With this class you are abled to move the joints by using joint angles and not MotorCounts as unit for the commands.
| void BHandForceKinGL::adjustForce | ( | const Motors | motors, | |
| const int | force | |||
| ) | throw (BHandException) |
Moves the finger(s) that the force is obtained.
The direction of the movement depends on the dircetion of the force. Negative force will close the hand and positive will open it.
So, if you want to hold an object with a specific force, you have to define the force negative.
WARNING The move functions (re)start the realtime mode by themself for the motors of the movement. If rt-mode is enabled it will not be disabled, because it costs to much time. So if you start rt-mode for F1 and want ot adjust the force for F2 you will have call stop() before calling adjustForce() !
| motors | Motors to be Moved. If spread is included it will be ignored. | |
| force | Force which should be applied to finger tips. |
In This version the Force in the OpenGL modell is updatet
Reimplemented from BHandForce.
| void BHandForceKinGL::updatePos | ( | ) | [protected] |
updates Joint Value of Modell to current of hand.
Sets the Values of the GLHand to the ones derived from the BarrettHand itself.
|
|
Generated Wed Aug 16 14:59:22 2006 by
|