
Open Robotics Automation Virtual Environment
 In cooperation with our partners we investigated several tools that may be
used in the HYFLAM project. The first big part is the Open Robotics
Automation Virtual Environment (OpenRAVE).
To experiment without unnecessary risk it would be useful to have a
simulation of the movement of the arm and the environment. To do so we
take a closer look at OpenRAVE, a simulation and analysis tool created
by Rosen Diankov to develop algorithms for motion planning. It offers a
large number of interfaces to some scripting languages like
Matlab or Python. OpenRAVE itself is implemented in C++ and has an
architecture that provides plugins. There are already plugins for some physics-engines
like ODE and Bullet but it is possible to implement the basic physics
engine interface with the help of any other physic-engine.
In cooperation with our partners we investigated several tools that may be
used in the HYFLAM project. The first big part is the Open Robotics
Automation Virtual Environment (OpenRAVE).
To experiment without unnecessary risk it would be useful to have a
simulation of the movement of the arm and the environment. To do so we
take a closer look at OpenRAVE, a simulation and analysis tool created
by Rosen Diankov to develop algorithms for motion planning. It offers a
large number of interfaces to some scripting languages like
Matlab or Python. OpenRAVE itself is implemented in C++ and has an
architecture that provides plugins. There are already plugins for some physics-engines
like ODE and Bullet but it is possible to implement the basic physics
engine interface with the help of any other physic-engine.
Some other interesting feature are visualization using 3D coins, the inverse kinematics solver called
IKFast and some trajectory-generators. IKFast has the ability to
calculate the inverse kinematic matrices of any complex kinematics
chain. In our case this is quite interesting because the position of the
TCP is in the hand and is determined by the arm and the wrist which
belongs to the hand. Of course there are no prebuilt kinematics
equations exactly for this combination.
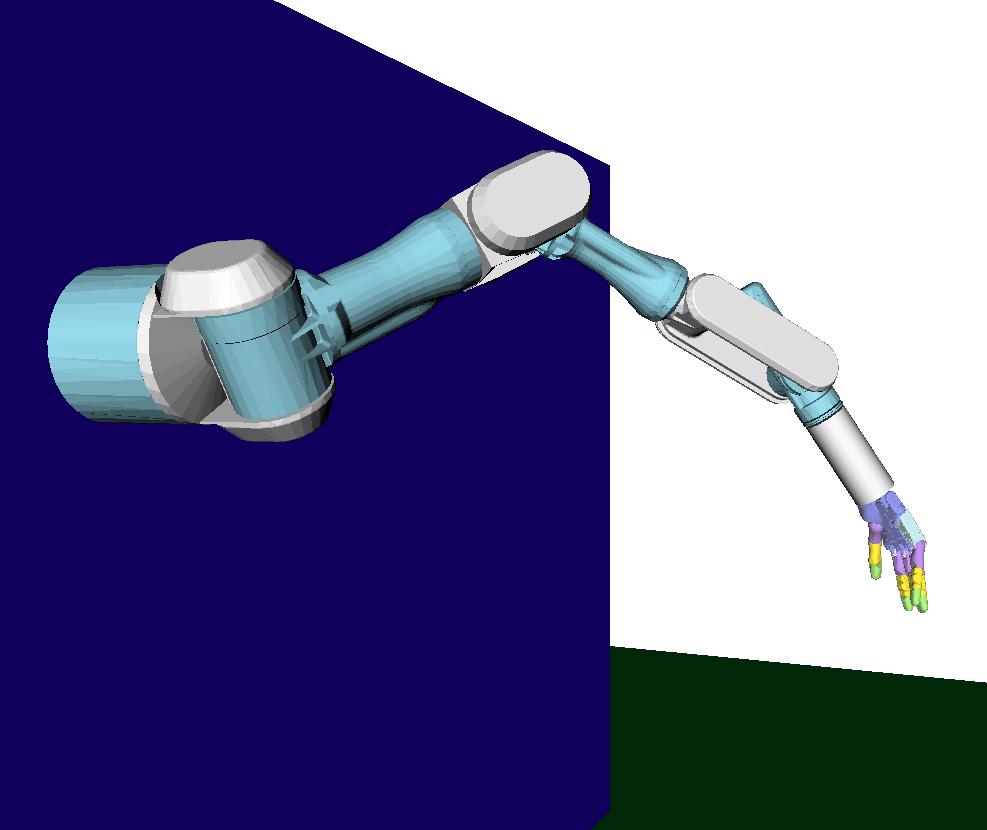
Further
more, OpenRAVE is still an active project working under a GNU Lesser
General Public License. There are a lot of already given models
including the Mitsubishi PA10 and the C6M dexterous hand used in HYFLAM.
For the control of the real joints there are some software projects
with a connection to the ROS framework. Even a grasp-planer named
Opengrasp exists.

