Dr. Chao Zeng
| Address: | Universität Hamburg Faculty of Mathematics, Informatics and Natural Science Department Informatics, Group TAMS Vogt-Kölln-Str. 30 D-22527 Hamburg |
| Position: | Postdoctoral Researcher |
About Me
Research Interests
- Robot imitation learning
- Learning compliant manipulation and grasping
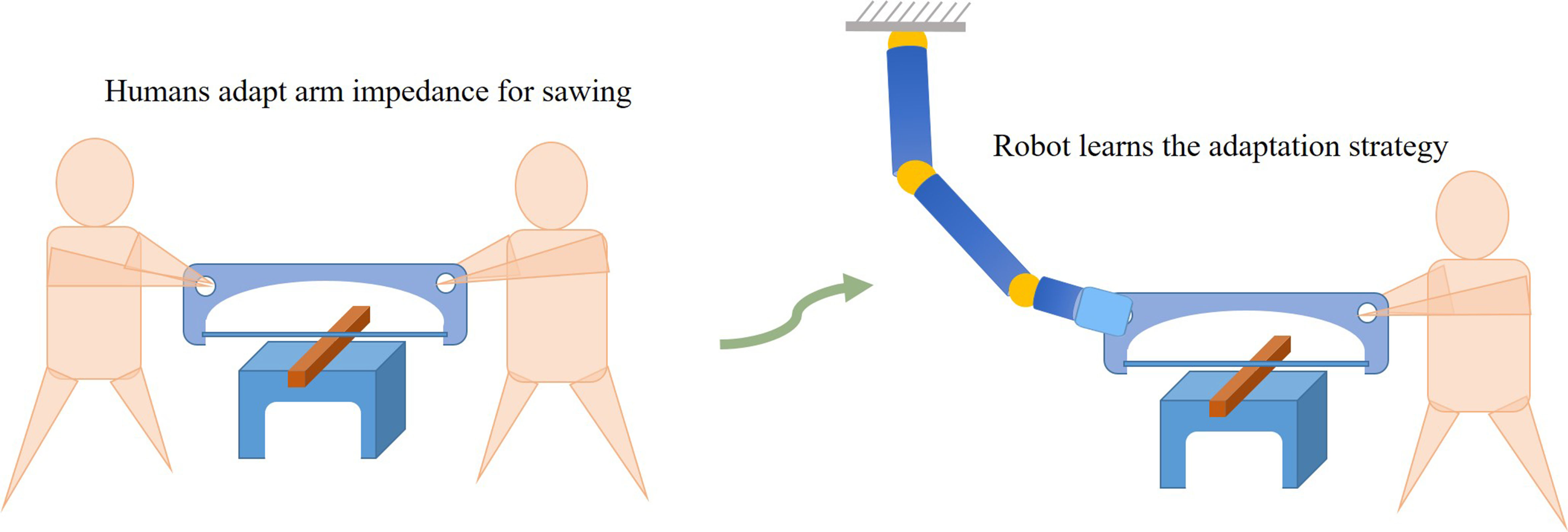
- Learning adaptive control
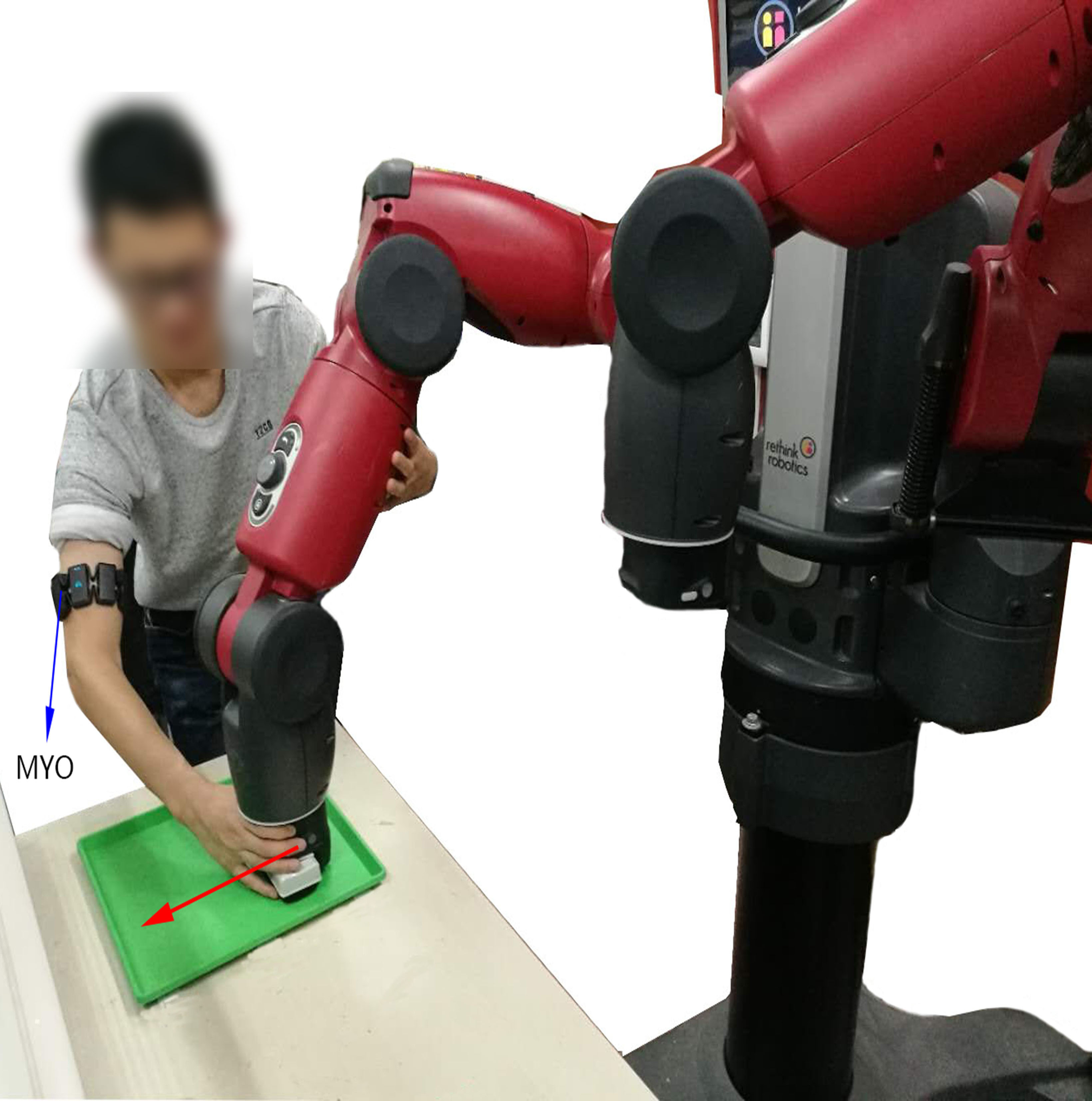
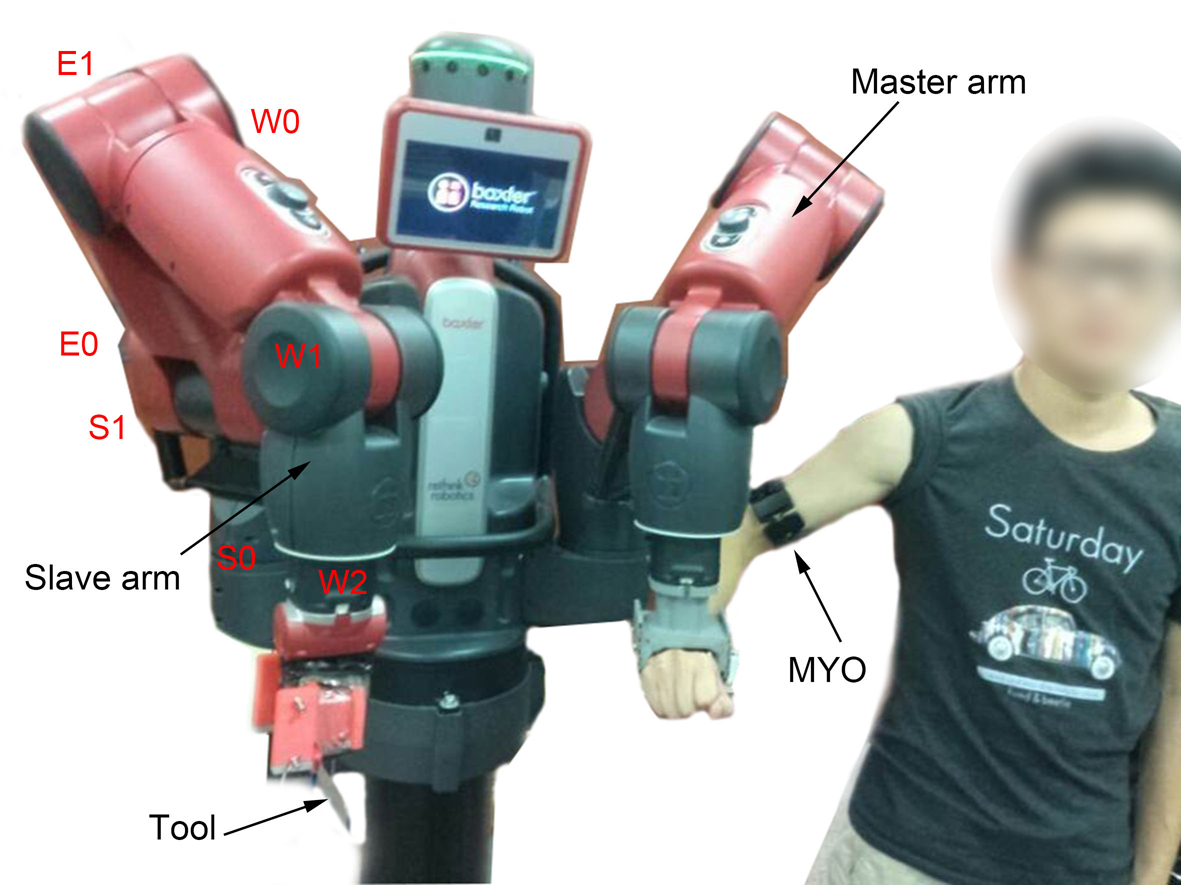
- Human-robot physical interaction and collaboration
Key Publications
- C. Zeng, S. Li, B. Fang, Z. Chen, J. Zhang. Generalization of Robot Force-Relevant Skills through Adapting Compliant Profiles, IEEE Robotics and Automation Letters, 7(2), April 2022.
- C. Zeng*, S. Li*, Y. Jiang, Q. Li,Z. Chen, C. Yang, and J. Zhang, Learning compliant grasping and manipulation by teleoperation with adaptive force control, IROS2021.
- C. Yang, C. Zeng, and J. Zhang. (2021). Robot Learning Human Skills and Intelligent Control Design. CRC Press.
- C. Zeng, C. Yang, H. Cheng, and S. Dai, Simultaneously Encoding Movement and EMG-based Stiffness for Robotic Skill Learning, IEEE Transactions on Industrial Informatics, 2020, 17(2), 1244-1252.
- C. Zeng, C. Yang, Q. Li and S. Dai, Research Progress on Human-Robot Skill Transfer, Acta Automatica Sinica, 2019, 45(10): 1813-1828.
- C. Yang, C. Zeng, C. Fang, W. He, and Z. Li, A DMPs-Based Framework for Robot Learning and Generalization of human-like Variable Impedance Skills, IEEE/ASME Transactions on Mechatronics, 2018, 23(3), 1193-1203.
- Yang, C., C. Zeng, Liang, P., Li, Z., Li, R., & Su, C. Y. (2017). Interface design of a physical humanrobot interaction system for human impedance adaptive skill transfer. IEEE Transactions on Automation Science and Engineering, 15(1), 329-340.
Featured Pictures