Research Interests
- Robotic Decision Making: Dynamic programming, Monte Carlo Method, Reinforcement learning.
- Learning to Grasp: Deep learning, Grasp planning.
- Reactive motion planning: model-based optimization, constrained optimization
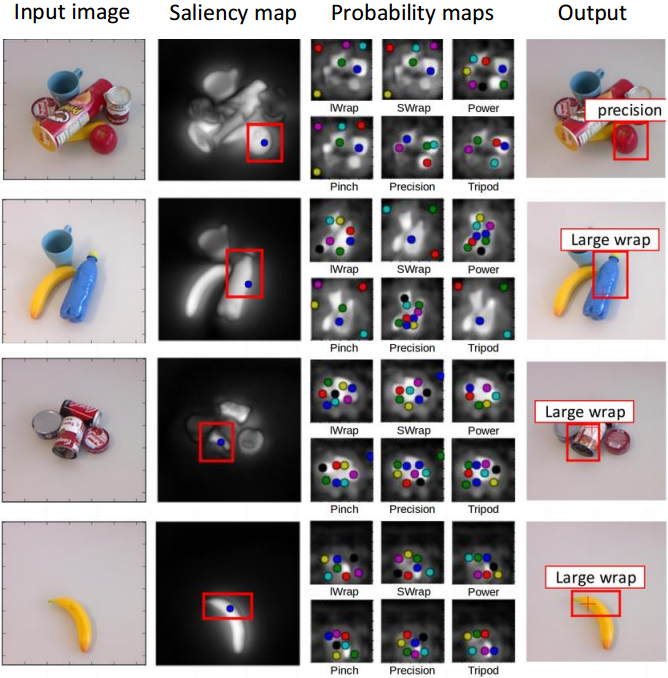
1. attention-based visual analysis for grasp planning
We present an attention based visual analysis framework to compute grasp relvent information in order to guide grasp planning using a multi-finger robotic hand.
Code: comeing soon, Data set: comeing soon,
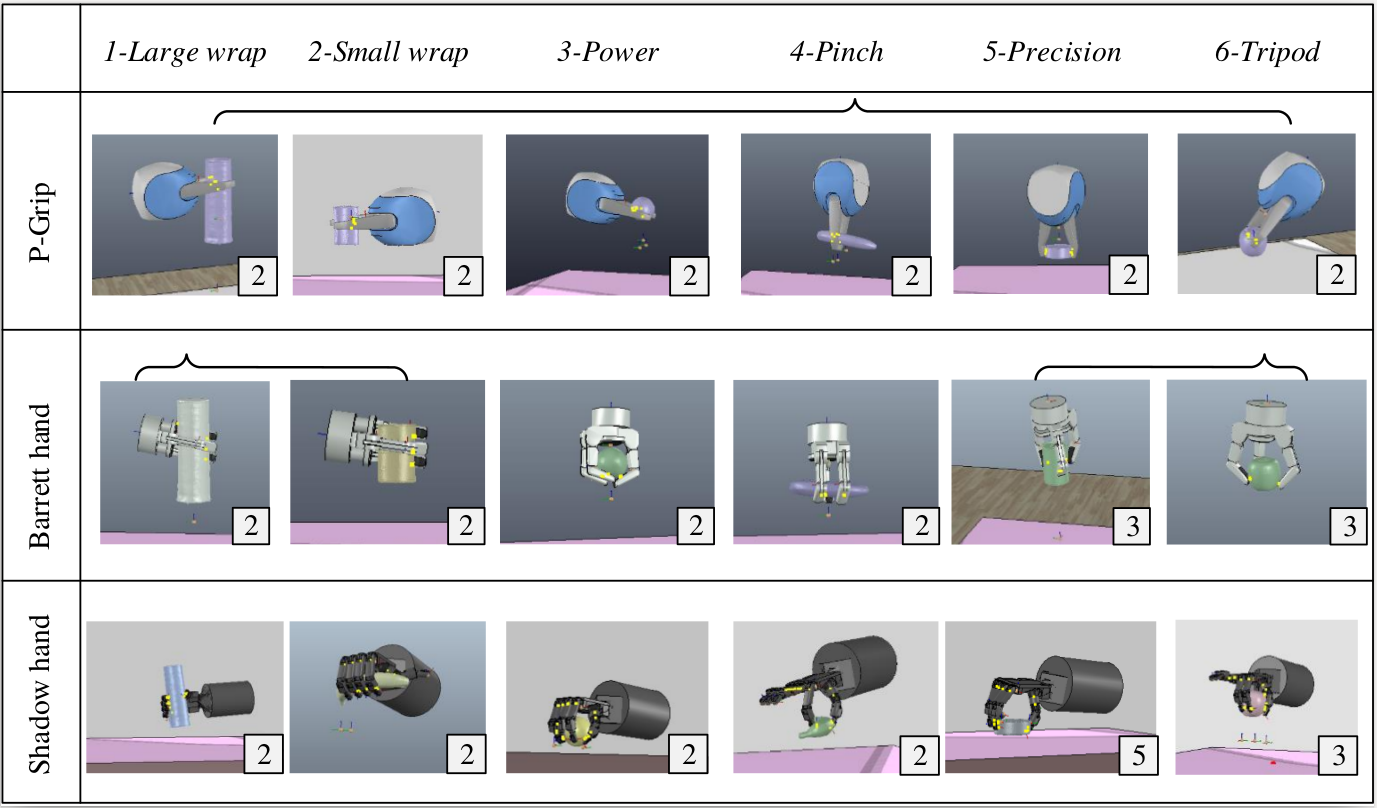
2. Toward general purpose grasp planning beginning with pregrasping opposition
This work explores the grasp planning problem of various robotic hands with an arbitrary number of fingers considering the use of gasp types.