Multimodal People Tracking
Service robots will increasingly support daily work in business or home environments in the near future. Possible services are delivery tasks, cleaning services or home care. An important criteria for the acceptance of robots in humans environment is the robot's ability to interact. Therefore it is essential to give the robot a detailed model of its environment, e. g. the location of its interaction partners. In general, this knowledge can only be generated using sensory input.
Both camera tracking as well as laser tracking have their own specific advantages and drawbacks. To build a robust and accurate tracking system it is necessary to integrate independent tracking algorithms working on different sensor modalities. With an appropriate fusion algorithm the specific advantages of the sensors could complement one another to decrease the overall error.
At the TAMS group a typical multiple target tracking system is implemented which consists of four blocks: sensor hardware, single sensor tracking, data fusion and track life management. This tracking system is implemented modularily to allow addition, removal and exchange of sensors and tracking algorithms. The most important aspect of a tracking system is its ability to filter and fuse the results from individual sensors. This isrealized using a Particle Filter. For details see
WWHZ2006.
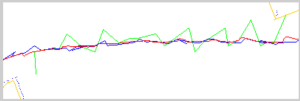
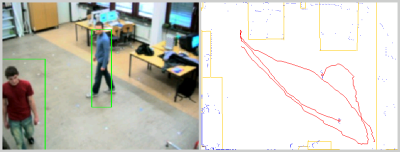
In the top left figure the observed person's true trajectory is assumed as linear. Although the greater variance of the trajectory computed by the camera algorithm (green) compared to the laser tracing results (blue) is obvious, the fused result (red) has improved compared to the laser tracking result.