
Reconfigurable Mobile Robot
The last few years have witnessed an increasing interest in research and application of mobile robotic technologies for civil rescue and search all over the world. The history of human development has always been a struggle with natural disasters such as earthquakes, storms and floods. Urban search and rescue is a domain that involves a great amount of manpower; and it is quite dangerous and laborious in a hostile environment. The development of mobile robots offers an intelligent alternative solution to the above-mentioned problems. In Japan, some prototypes aiming to mitigate the damages and decrease the number of victims during accidents and disasters were achieved at the International Rescue System Institute (IRS). Another good example is the use of robots for the search and detection operation in the collapsed World Trade Center in September 2001. In Europe, security robotics becomes an important part of the 7th Framework Programme.
Since 2006, based on smart Gecko Robot project, a more flexible novel modular reconfigurable mobile robot named JL-I with various moving modes was proposed, which consists of three connected, identical modules for crossing grooves, steps, obstacles and traveling in complex environments. JL-I features three-degree of freedom (DOF) active joints for changing shape and a flexible docking mechanism. In order to enable adaptive movement, the robot’s mechanical structure is employed to drive serial and parallel mechanisms to form active joints for changing shape in three dimensions.
The coordinator of JL-I project is Ph. D. Wei Wang from BUAA, who is currently a visting scholarship at TAMS.
Design considerations
1. Locomotion capability is the lowest basic functionality of the robotic system, which includes the following details. The robot works not only indoors but outdoors as well. It should have a flexible mobility in rugged terrain to get to every point in the work space. In order to finish a task in an unstructured environment, the ability to cross high obstacles and span large gaps is indispensable. Sometimes the working environment is very complicated, including not only high steps and deep ditches but also narrow fences and floors cluttered with debris. As a result, the robot should have the capability of adopting different configurations to match various tasks and suit complex environments.
2. Working autonomously with the corresponding effective treatment: As a searching mobile robot, it should move as fast as possible in order to get real-time information. Once the global task commands are entered by the user, the robot should move while accomplishing the rescue task. Path planning and behavior organization is built on global prior knowledge and local sensory information.
3. No connection with the environment: In order to move freely, it is important for the mobile field robot not to be wired or otherwise connected to the environment. The robot should carry all it needs: onboard power, the controller, and wireless communication.
4. Cooperation ability: The rescue robot is designed to operate with humans. The level of interaction may vary significantly, depending on the robot’s design and on the circumstances. The controlling and monitoring of the robot is achieved through a GUI to allow an effective and user-friendly operation. Usually urban searching and rescuing is based on the cooperation in a team. The given targets will be assigned separately. Every robot should communicate with the others and perform distributed activities.
Prototype Design and Realization
The proposed mobile system should have various moving modes. The JL-I system consists of three connected, identical modules for crossing grooves, steps, obstacles and traveling in complex environments. Design of the robot includes five parts:
1) Design of the independent mobile module which includes movement mechanisms and driving systems;
2) Development of the docking system and the reconfigurable driving mechanisms;
3) Development of the control system;
4) Kinematics analysis;
5) Experimental testing.
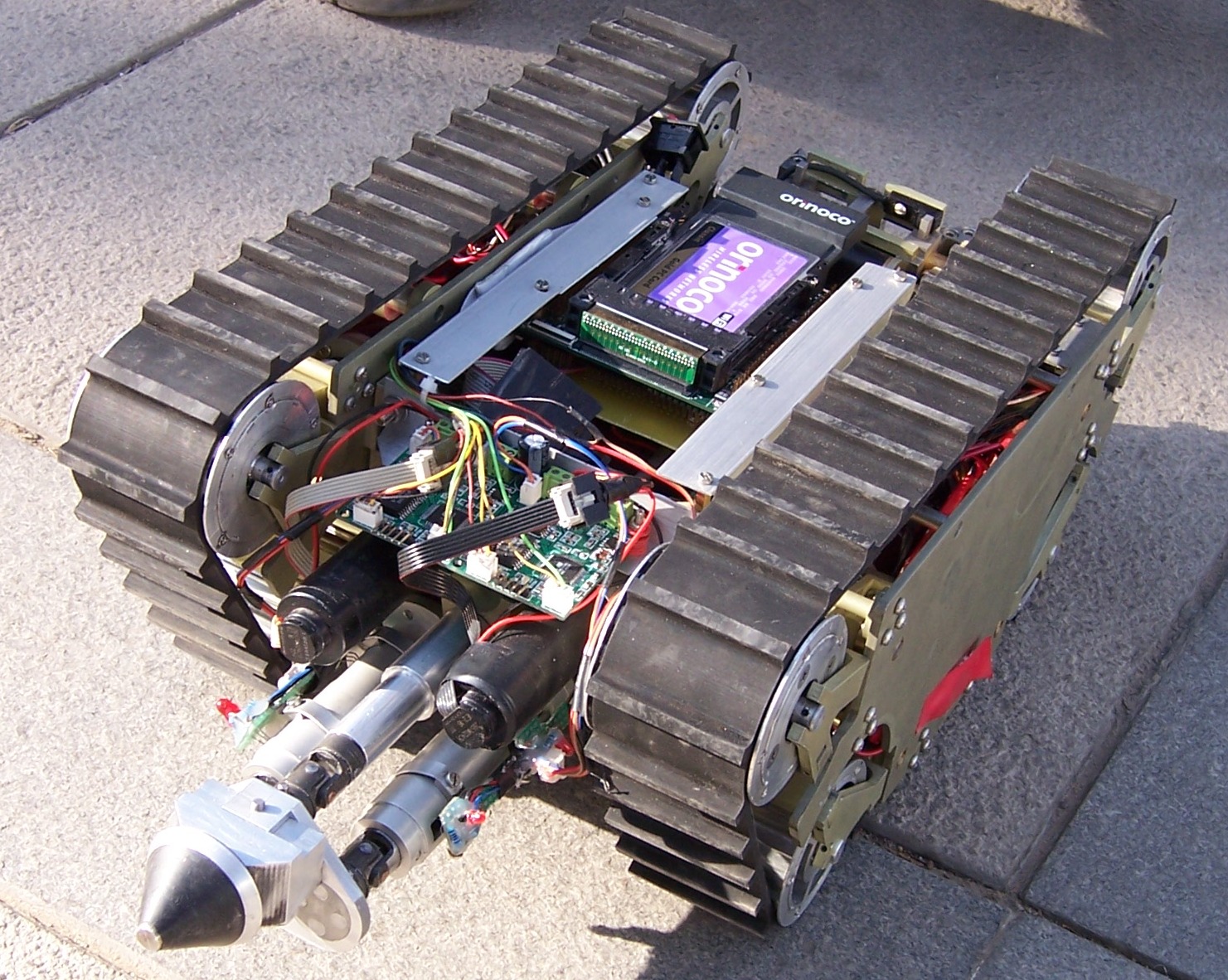
|
|
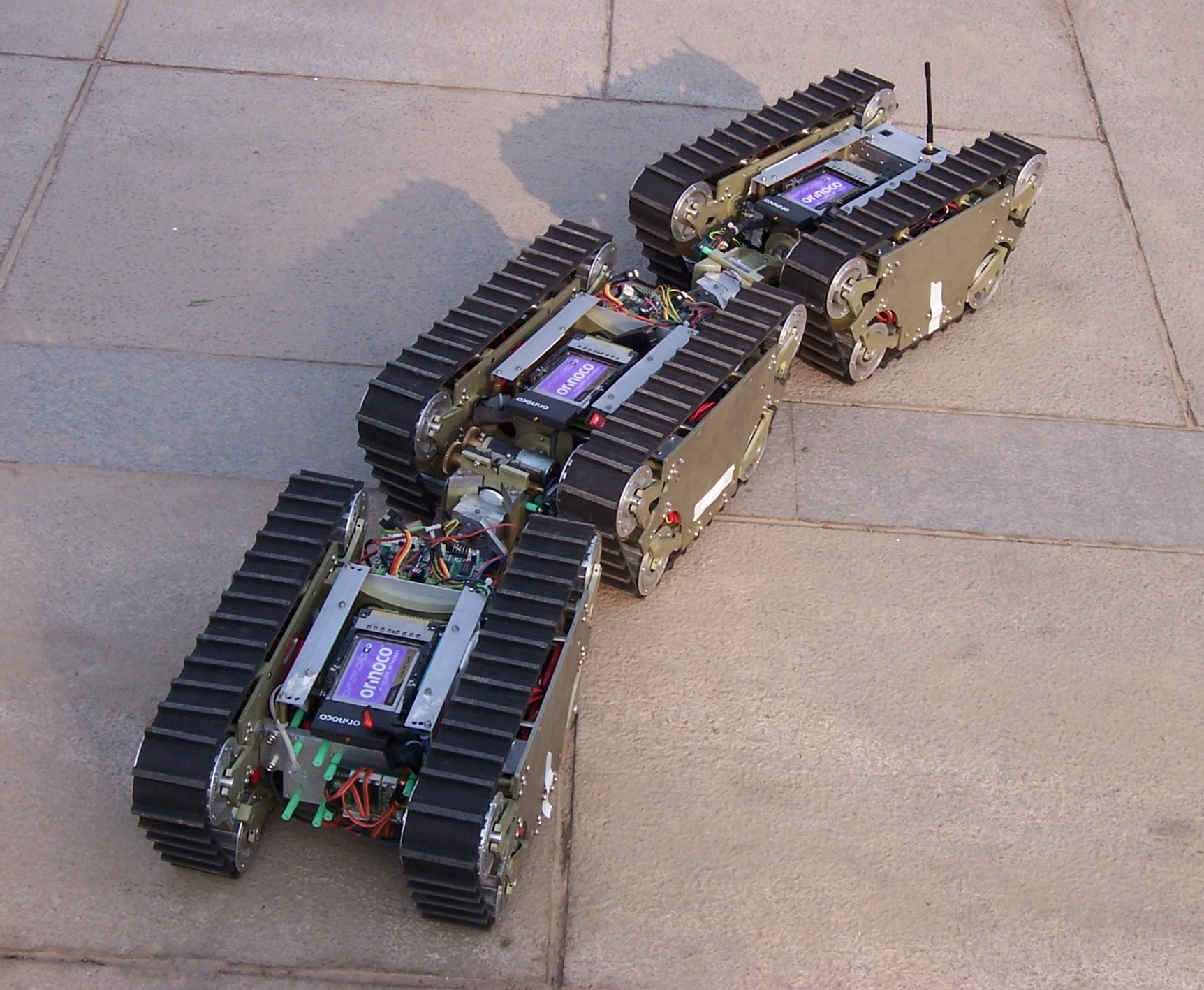
|
| Fig. 1 Single Module | Fig. 2 Two Units Together | Fig. 3 JL-I with Three Units |
The mechanical structure of JL-I is flexible due to its identical modules and special connection joints. Actually, each module is an entire robot system that can perform distributed activities (Fig. 4). Three DOF active spherical joints between two modules and the docking mechanism enable the adjacent modules to adopt optimized configurations to negotiate difficult terrain or to split into three small units to perform tasks simultaneously.

|
| Fig. 4 Performing Distributed Activities |
By combining such locomotion capabilities, JL-I will move in almost all kinds of rough environments. The principle of terrain adaptability is shown in Fig. 5. The robot can change its posture by pitching around the Y axis, yawing around the X axis and rotating around the Z axis. The yawing and pitching movements are achieved by the parallel mechanism. The third rotation DOF around the joint’s Z axis is achieved by the serial mechanism.
- Smooth movement: It is known that a common mobile robot will lose its moving ability if it is not able to keep its balance. However, the JL-I with its many active spherical joints can smooth the undulating motion of the gravity centre of the whole system;
- High adaptability: Identical modules in the JL-I robot have a large variety of configurations owing to the pose-adjusting joints and the docking mechanisms. Therefore, the robot can adopt many shapes which make the JL-I system able to carry out various different tasks and move in diverse environments;
- Self recovering ability: Furthermore, JL-I has the ability to implement self-recovery. By disconnecting the malfunctioning module, the system can repair itself if one module does not work normally. In this way, working safety and efficiency are increased when the robot moves in a complex environment.
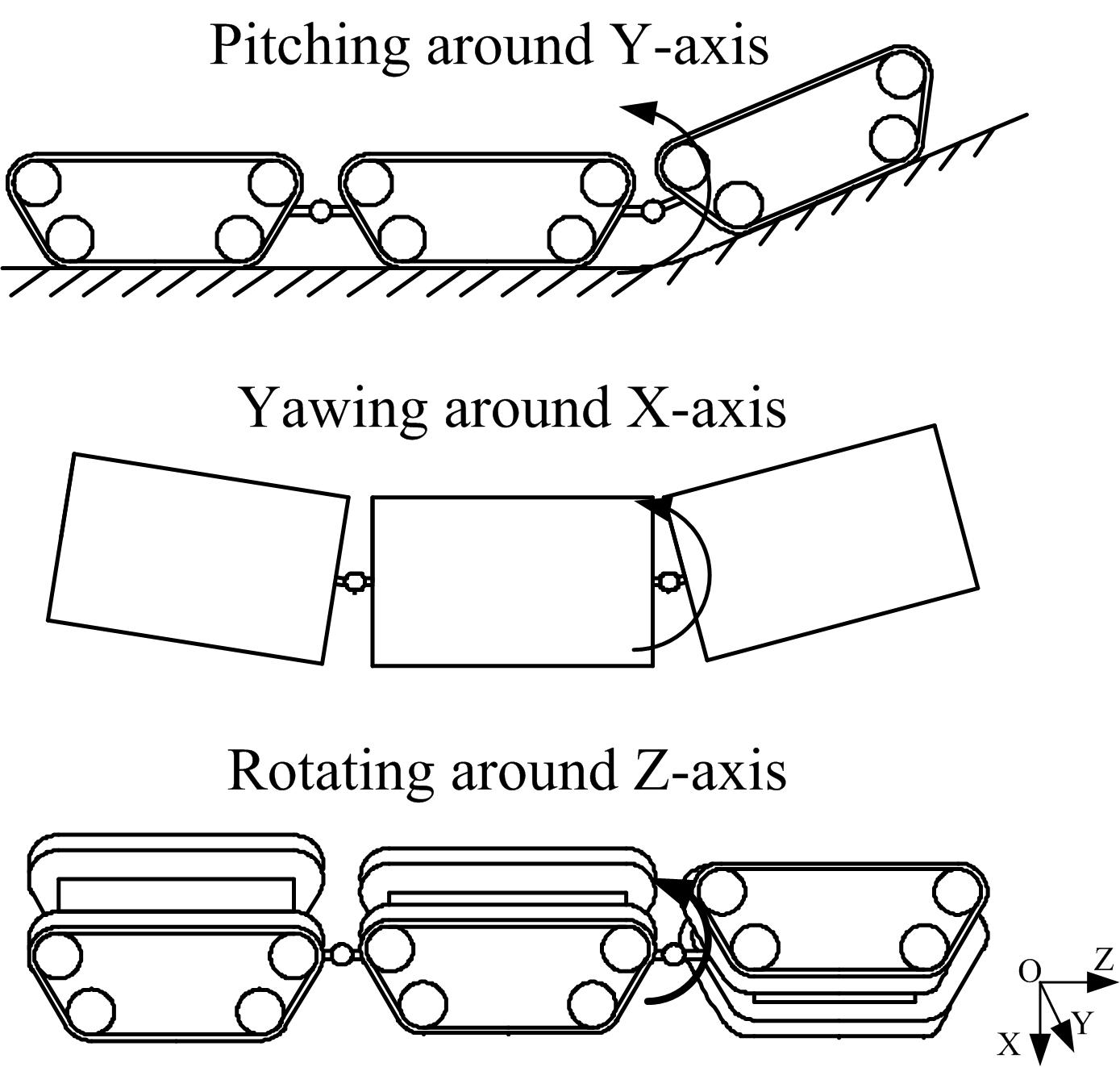
|
| Fig. 5 Adapting to Terrains |
The details of mechanical system design can be found from our published papers.
Required Locomotion Capability
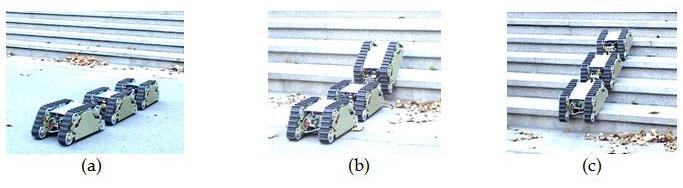
Due to the uncertainty of the practical environment, it is important for a robot to be able to carry out various complicated locomotion processes for performing urban search and rescue tasks. The JL-I is capable of almost all necessary actions that can be required in real situations, e.g. crossing obstacles such as steps and roadblocks, self-recovery.
|
| Fig. 6 Climbing Stairs |
|
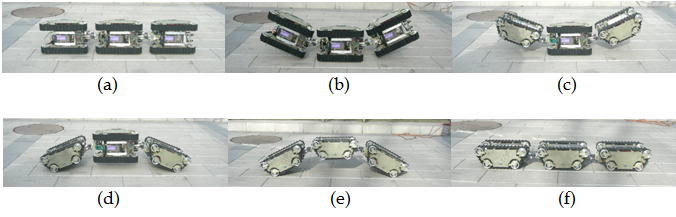
| Fig. 7 90 Degrees Recovering |
Other Information
Copyright(C) Houxiang Zhang, All rights reserved
- The contents of this web site are with Copyright of Houxiang Zhang or a third party where contributors are indicated. You may view this site and its contents using your web browser. You may save or print an electronic copy of parts of this web site for your own information, research, or study. Permission must be sought for any other use.
- For the publication materials, although personal use is permitted, you are strongly suggested to obtain them directly from the publishers, such as IEEE. Permission to reprint/republish the material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of the work in other works must be obtained from the publisher(e.g. the IEEE).