
Bio-inspired Climbing Caterpillar Robot...
BICCA project is funded by by the Deutsche Forschungsgemeinschaft from Oct. 2010 (DFG, No. U-4-6-04-DFG-10-01). As the PI of this project, I proposed the idea and began to work on it in 2007.
This project is based on the cooperation with Ph. D. Wei Wang at BUAA in China, and Ph.D. Juan González-Gómez from the School of Engineering, Universidad Autonoma de Madrid in Spain.
We want to design a mini-climbing robotic prototype with full locomotion capability. Firstly the climbing should have special instrument for adhesion on vertical surface. Based on the current attachment principles adopted by climbing robots, it is hard to get the object. The new adhesion principle is definitely necessary to be investigated so to release the robotic system of heavy adhesion devices. Also the robot should have enough degrees of freedom (DOF) to move in different gaits in the structured working environment. Many DOFs need isomerous quantitative actuators from which a heavy and quite big mechanical structure will result. If we can take advantage of combining several DOFs to realize a movement which normally requires an independent actuator, it could be possible keep the movement flexibility with a lightweight system design.
Although the configuration and gait of our climbing caterpillar are similar to those of the normal serial-connected module snake-like robots moving on the ground, the fixed constraints introduced by the climbing attachment mechanism are particular problems which we need to consider in designing and controlling our caterpillar. Also the modular climbing caterpillar robot can be built to feature many different kinematics that will in turn determine the gait and constraint state of the robot.
Our climbing caterpillar robot will also differ from the snake robot in the following respects.
1) The driving force: The snake robot mainly creeps on the ground, and its locomotion depends on the friction force between the body and the ground. While the climbing caterpillar crawls on the vertical wall, it must adsorb on the wall, or it will fall. As a result, its locomotion driving force comes from the fixed physical constraint.
2) The locomotion gait: The snake robot can crawl in many different ways, like wriggle, spiral, etc., while normally the caterpillar only crawls in vermicular fashion. For some special cases, the snake and the caterpillar both can roll.
3) The mechanical module: The climbing caterpillar needs an adhesion module to adsorb, while the snake-like robot does not.
To the best of our knowledge, there is currently no similar robot that can both travel on vertical surfaces and crawl in serpentine movements on the ground. A smart climbing caterpillar is a completely novel prototype meeting all requirements of functionality, safety, flexibility, extensibility and easy handling while being completely automatic and able to learn by itself.
Basing on the investigation of movements mechanism of natural caterpillars, we combine climbing techniques with the idea of a modular robot to propose an inspired multifunctional modular climbing caterpillar, which is capable of:
- Walking and climbing not only on rugged terrain but also on the vertical surfaces and ceilings on the inside of buildings;
- Locomotion capacities including pitching, yawing, lateral shift, and rotating;
- Sensor-servo-based active perception of the environment.
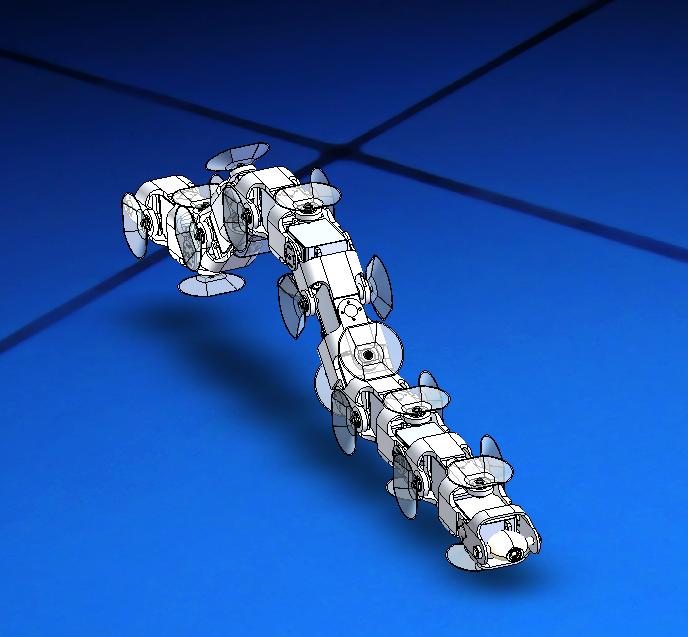
|
| Fig. 1 Prototype Design |
The goal of this research is to develop a flexible bio-inspired mobile robotic platform featuring an easy-to-build mechanical structure, a low-frequency vibrating passive attachment principle and various locomotion capabilities. The proposed robotic caterpillar will be endowed with a novel control hierarchy with different levels. We will implement new biologically inspired approaches on the system and improve the flexibility of robotic systems.
The main novelties of this present proposal are:
- a novel and lighter robotic structure based on distributed processing, a novel passive adhesion principle;
- a biologically inspired control architecture, that will allow adaptation to new or changing environments.
Another feature of this proposal lies in the new attachment principle. There are two reasons for designing a passive sucker for climbing robots. Firstly, the climbing robot can be made lightweight and dexterous. Application of a new low-frequency vibrating passive suction method makes it possible to free climbing robots from the heavy vacuum ejectors and realize an effective simple adsorption, furthermore improve the inspired technological level and flexibility of the locomotion capability. Secondly, the attachment using suckers has the characteristic of passive compliance due to the compressibility of the material, thus makes the robot safer than other principles. Some previous work has been done recently in TAMS.
These systems not only are the basis of a new approach to robotics, but also contribute to reducing the overall computational load and minimizing system cost and power consumption.
From Sept. 2006 to now, we have begun to do some research on modular climbing caterpillar project in our TAMS group. Our testing and trying focused on the following aspects in order to make sure the modular climbing idea feasible. The implementation includes following steps: reliability of the attachment, lightweight mechanical module and movement function realization.
Passive Attachment
Recently, a new passive suction method is presented in order to keep the merits and eliminate the shortcomings of using the normal active vacuum suckers. The new adhesion principle can be explained in the following steps. Firstly when the passive sucker is pushed against on the vertical surface, it can be attached when the inside air is squeezed out so that the internal vacuum is established. When the squeezing process almost finished, the negative pressure will be increased to some certain level. However it is only a matter of time that passive suckers will release down anyway. The adsorption time is dependent on the characteristics of the wall surface, such as smoothness and cleanness. If the passive sucker is pushed down again before it drops down, the internal vacuum can be rebuilt for sure. As a result, the passive sucker will keep attachment on the vertical wall for some longer time.
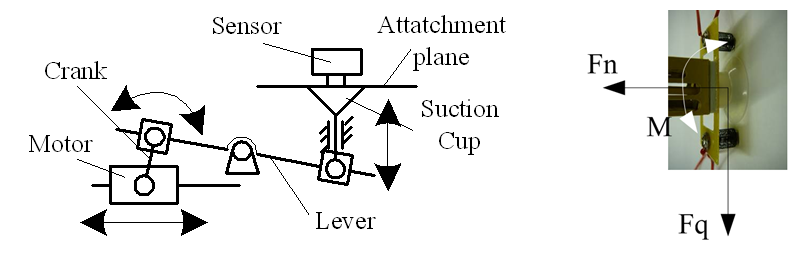
Based on this principle, we did some rational tests. A DC motor is used as an oscillator to realize the pushing and lifting movement automatically, as shown in Fig. 2. The motor drives a crank in continuous rotation, which is then converted into up and down motion of the sucker via the lever mechanism, and make the sucker vibrate on the attachment plane. The air pressure in the suction cup can be sampled by sensors. The vacuum inside sucker is established by vibration of the sucker against the wall surface so that the stability and reliability are met. According to the experiments, the following aspects could be concluded.
1) The vibrating suction method can produce stable negative air pressure with a certain vibration amplitude level and vibration frequency.
2) The larger the amplitude under the limitation which will release the sucker completely and frequency are, the higher the negative air pressure in suction cup will be achieved. On the contrary, the smaller the amplitude and frequency are, the lower the negative air pressure is.
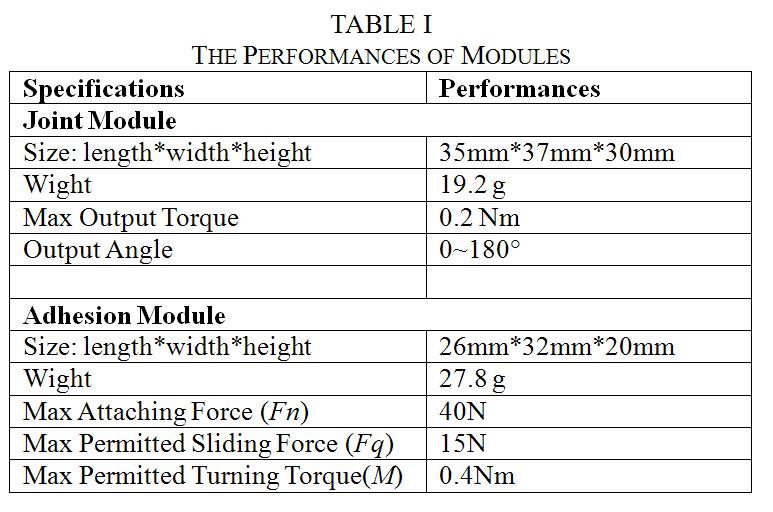
3) The vibration amplitude plays a more important role than the vibration frequency in producing the negative air pressure. The details can be found Table I. Where Fn is the Max attachment force, Fq is the Max slipping force, and M is Max torque.
|
| Fig. 2 Passive Attachment Principle |
|
Simple testing on climbing caterpillar idea
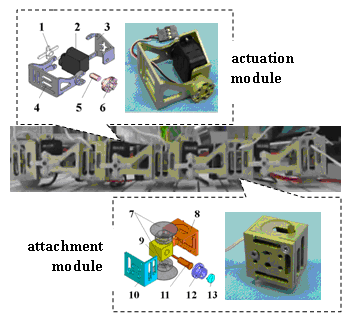
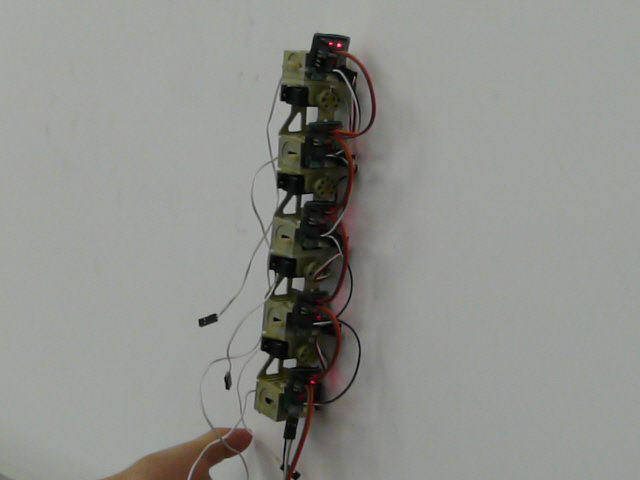
Meanwhile, a very cheap and easy-building prototype including joint actuation modules and adhesion modules is designed and manufactured as an experimental caterpillar version, as shown in Fig. 3. A shell supports a RC servo with a pair of ears. An extra box is on the back of shell, in which the battery, a simple controller and some auxiliary connecting parts for passive suckers are. The basic module is about 50 mm long, 30 mm wide and 30 mm high. All mechanical parts are manufactured from aluminum.
The actuation module is driven by an embedded FUTABA servo motor, while the adhesion module is equipped with a passive sucker and a releasing mechanism driven by a solenoid. The performances of these two modules are listed in Table I.
|
|
| Fig. 3 Testing Design | Fig. 4 Climbing Testing |
1.propeller 2.servo motor 3.bracket1 4.bracket2 5.shaft 6.barrel 7.sucker 8.shell1 9.solenoid 10.shell2 11.iron core 12.barrel 13.baffle
Other Information
Copyright(C) Houxiang Zhang, All rights reserved
- The contents of this web site are with Copyright of Houxiang Zhang or a third party where contributors are indicated. You may view this site and its contents using your web browser. You may save or print an electronic copy of parts of this web site for your own information, research, or study. Permission must be sought for any other use.
- For the publication materials, although personal use is permitted, you are strongly suggested to obtain them directly from the publishers, such as IEEE. Permission to reprint/republish the material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of the work in other works must be obtained from the publisher(e.g. the IEEE).